Erkennung von Pflanzpositionen für einen autonomen Pflanzroboter
Zeitraum und Kontext
Das Projekt begann im Mai 2026 am Institut für angewandte KI und Robotik.
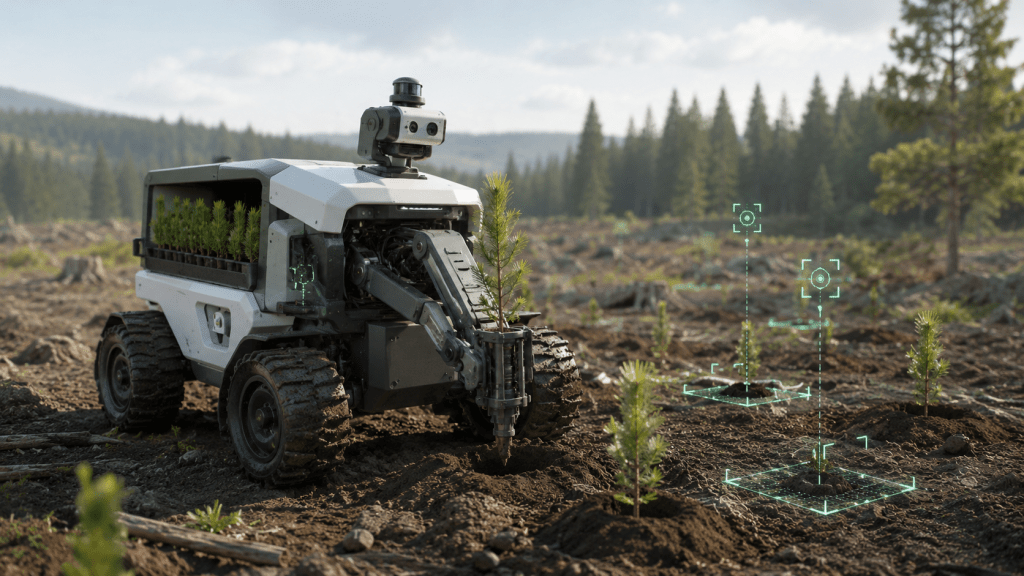
Ziel ist die automatische Erkennung geeigneter Pflanzposition für einen autonomen Baumpflanzroboter. Dadurch soll der Pflanzprozess automatisiert durchgeführt und die Prozesssicherheit während der Ausführung gewährleistet werden.
Als Entwickler trage ich die volle Verantwortung für die Erkennung der Pflanzpositionen – von der Projektplanung über die Entwicklung bis hin zur Evaluation des Systems.
