Detection of planting positions for an autonomous planting robot
Timeframe and Context
The project started in May 2026 at the Institute for Applied AI and Robotics.
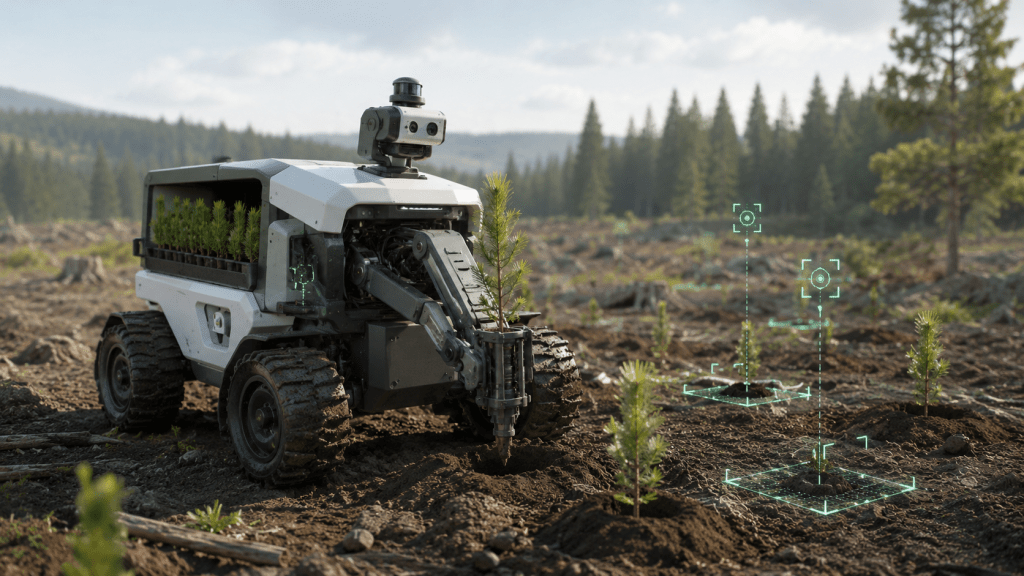
The goal is to automatically detect suitable planting positions for an autonomous tree-planting robot. This is intended to automate the planting process and ensure process reliability during execution.
As a developer, I bore full responsibility for the detection of the planting positions – from project planning through development to the evaluation of the system.
